Obstacle Avoidance Sensor Module
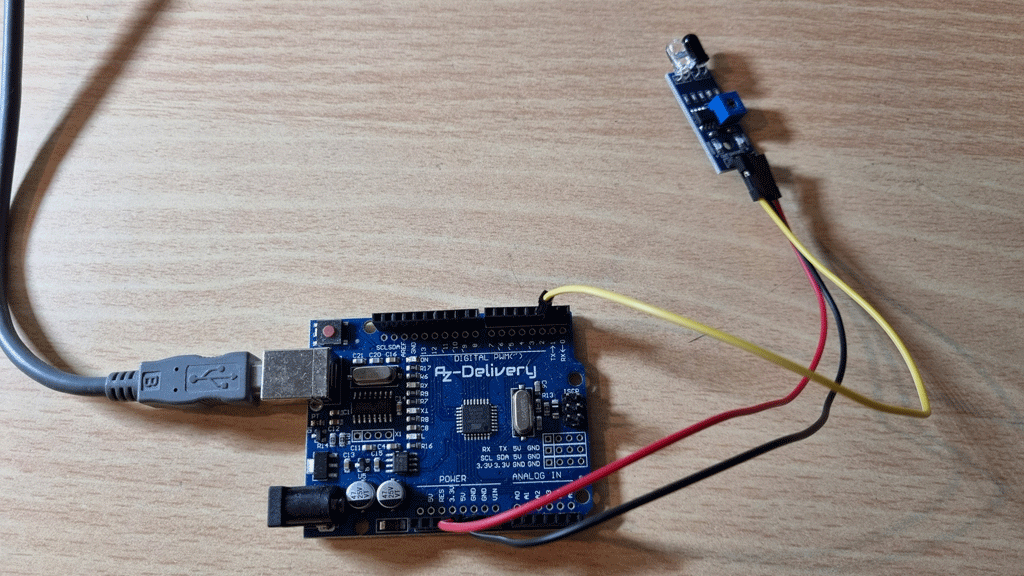
Getestet habe ich das IR-Modul „Flying-Fish“ aus dem Starter-Kit von AZ-Delivery.
Mein Versuchsaufbau besteht aus:
- 1 x Arduino Uno-Nachbau von AZ-Delivery
- 1 x IR-Modul „Flying-Fish“ aus dem 16-teiligen Startenset
- Kabel
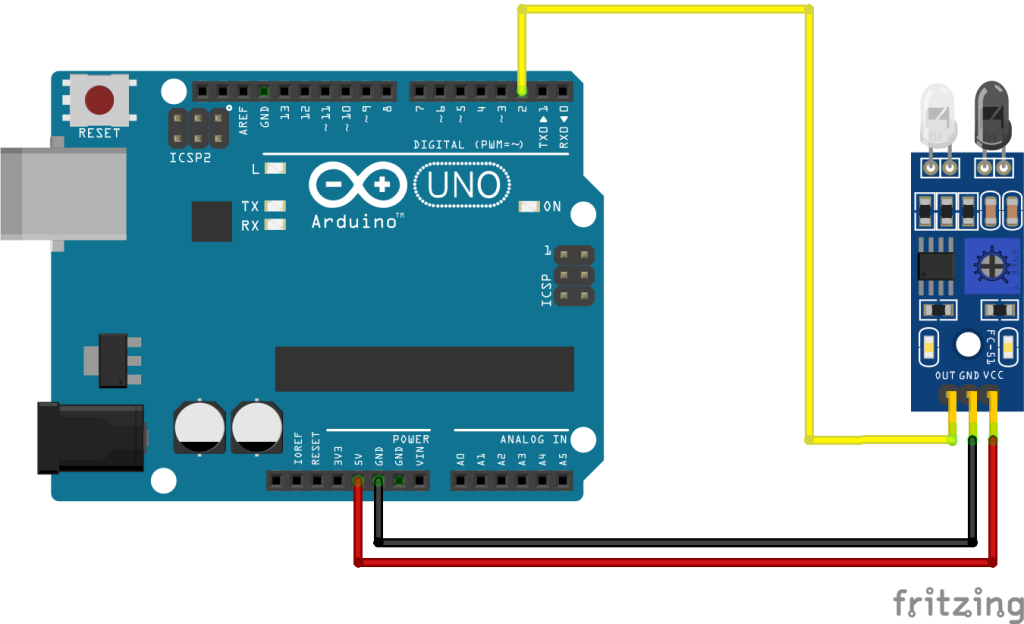
Folgender Quellcode wurde verwendet und stammt aus der Beschreibung von AZ-Delivery:
define DIGITAL_PIN 2
boolean sensorOut = HIGH;
void setup() {
Serial.begin(9600);
pinMode(DIGITAL_PIN, INPUT);
}
void loop() {
sensorOut = digitalRead(DIGITAL_PIN);
if (sensorOut == LOW)
{
Serial.println("Obstacle detected!");
}
else
{
Serial.println("No Obstacle");
}
delay(1000);
}
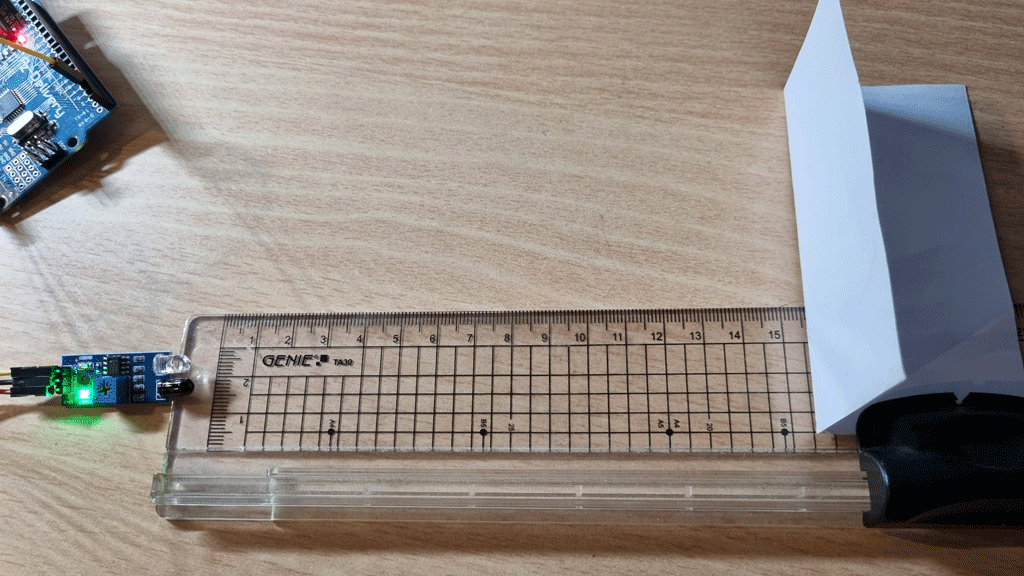
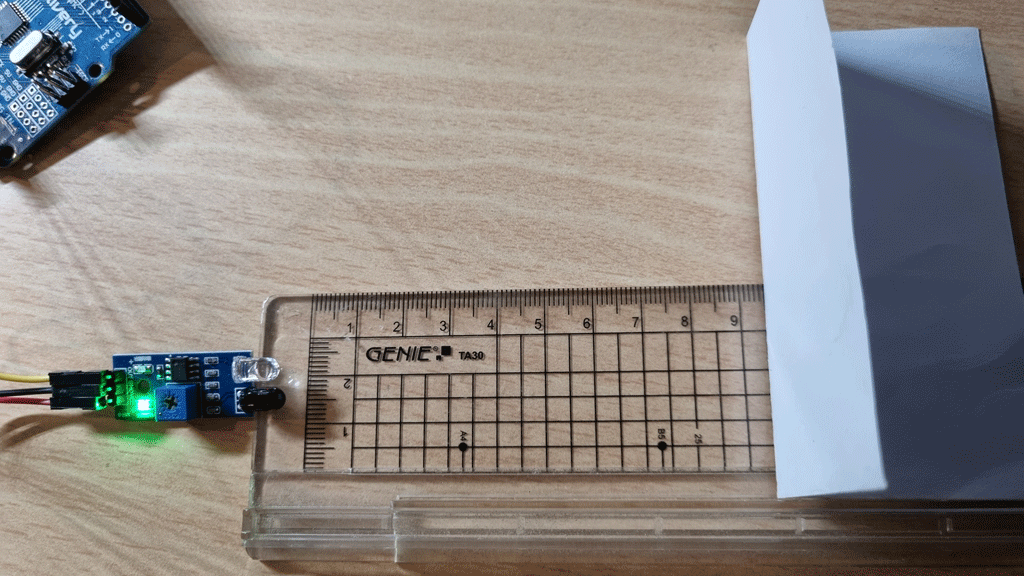
Der Quellcode funktioniert bei mir einwandfrei und gibt bei einem gewissen Abstand aus, dass er ein Hindernis erkannt hat.
Einen Rückgabewert der Distanz gibt es leider nicht.
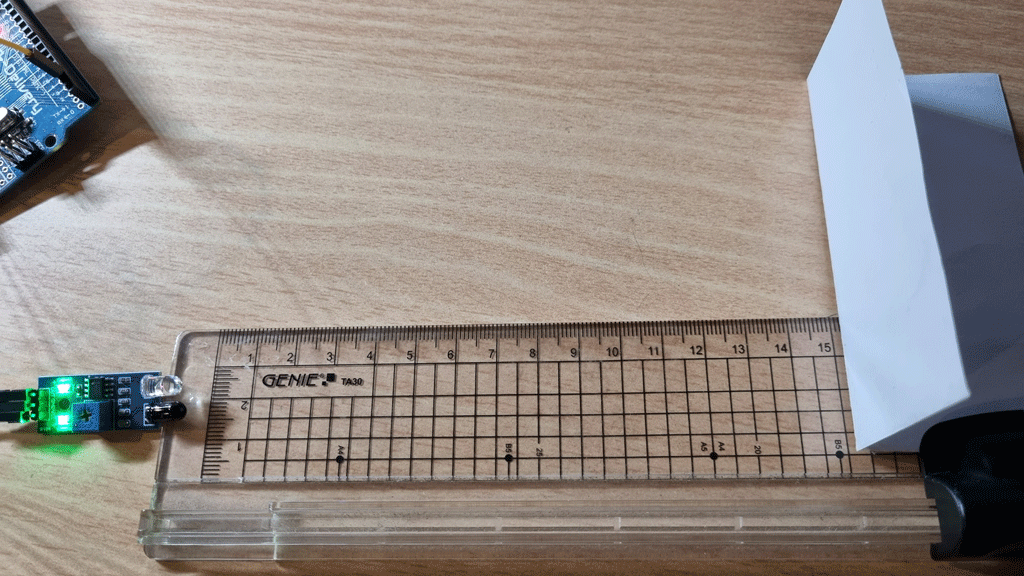
Aber durch das Poti auf dem Modul kann der Abstand, bei welchem das Modul schalten soll, eingestellt werden. Gegen den Uhrzeitgersinn minimiert den Abstand. Die größte Distanz betrug bei meinem Test 50 cm.
Allerdings:
Ich habe 2 Sensoren in der Dunkelheit montiert. Am folgenden Tag lieferte eins, im Gebäude eingesetzt, die Ergebnisse, die es sollte. Das Zweite, im Gebäude mit Ausrichtung nach Außen, lieferte keine verlässlichen Messungen.
Scheinbar sind die Module empfindlich gegenüber Sonnenlicht und der damit ausgesendeten UV-Strahlung.
Nach Einbau des zweiten Moduls im Gebäude ohne Ausrichtung zum Tageslicht funktioniert mein Projekt, Überwachung eines Garagentores, einwandfrei.