Getestet habe ich das IR-Line-Tracker-Modul HW-511 aus dem Starter-Kit von AZ-Delivery.
Mein Versuchsaufbau besteht aus:
- Arduino Uno-Nachbau von AZ-Delivery
- Ultralschall-Modul aus dem 16-teiligen Startenset (HC-SR04)
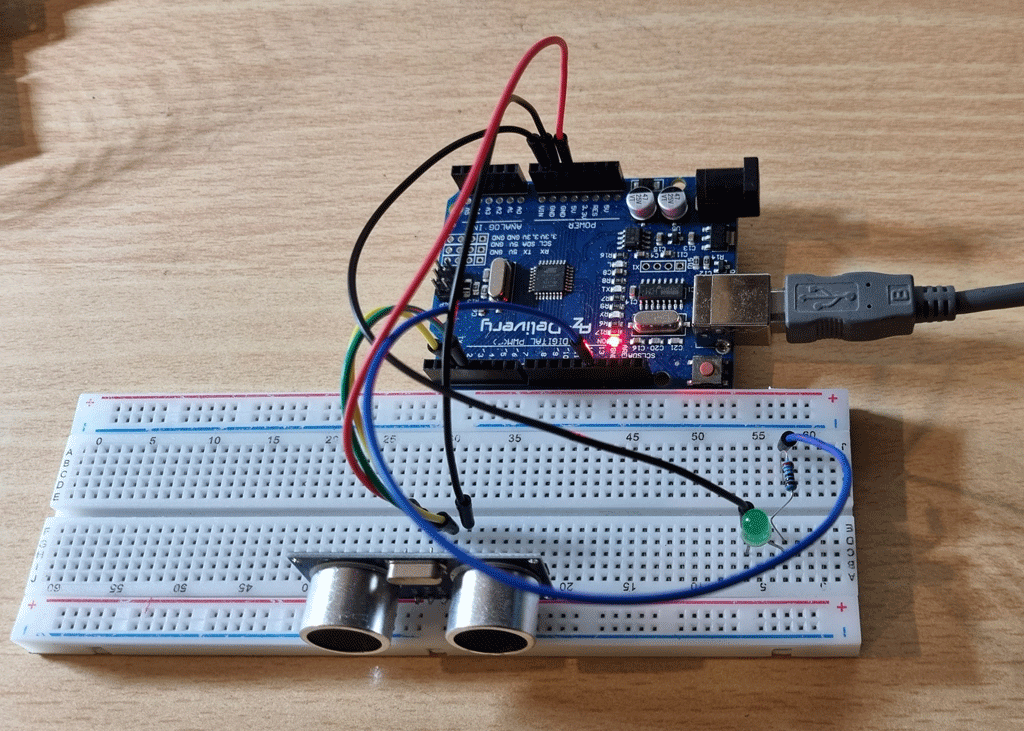
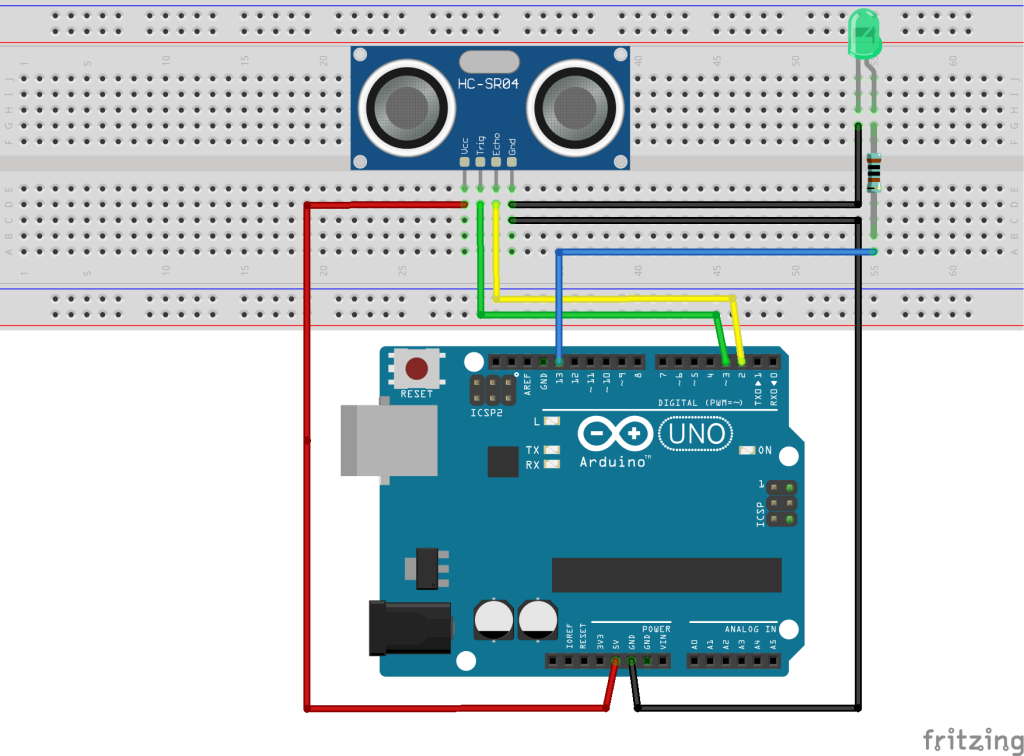
Folgender Quellcode wurde verwendet und stammt in der Grundbasis aus der Beschreibung von AZ-Delivery.
Die LED für die Anzeige der Unterschreitung eines gewünschten Mindestabstand wurde von mir hinzugefügt:
const int minDist = 30; //Mindestabstand in cm
const int anzPin = 13; //Anzeige ob Mindestabstand unterschritten
long duration;
int distance;
int trigPin = 5;
int echoPin = 4;
void setup()
{
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
//LED-Anzeige
pinMode(anzPin, OUTPUT);
Serial.begin(115200);
}
void loop()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2;
Serial.print("Distance: ");
Serial.println(distance);
if(distance < minDist)
{
digitalWrite(anzPin, HIGH);
}
else
{
digitalWrite(anzPin, LOW);
}
delay(1000);
}
Der Quellcode funktioniert bei mir einwandfrei. Die ausgegebene Distanz stimmt im Allgemeinen überein, allerdings habe ich die Genauigkeit von 3 mm durch meinen provisorischen Testaufbau nicht überprüfen können. Ich werde aber bei nächster Gelegenheit im Außenbereich ein Szenario aufbauen, in welchem ich den Winkel und und die Reichweite austesten kann.